
(1)の解説の9行目で小物体Aからとありますが、小物体Bからの誤りですm(_ _)m
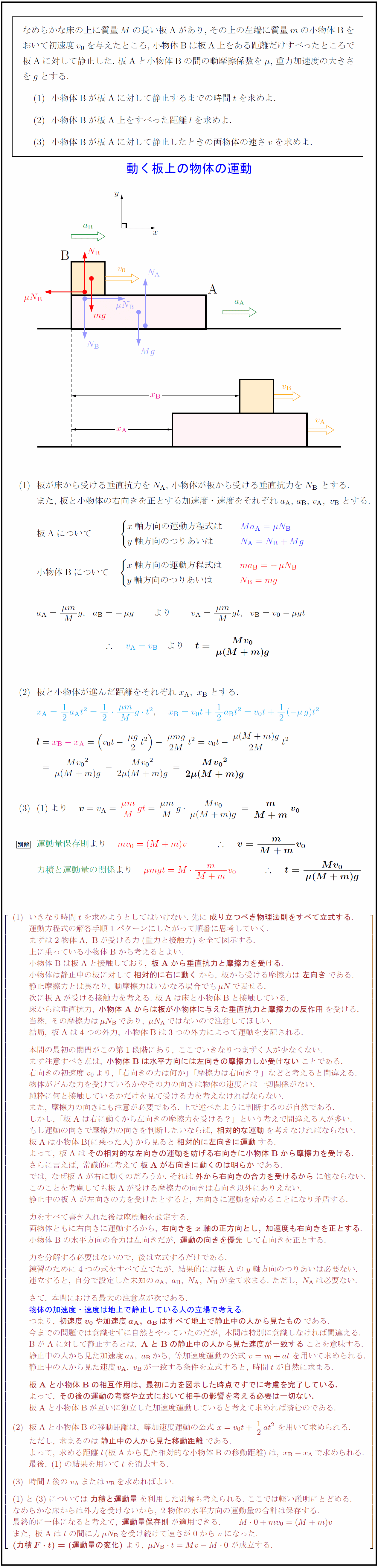
なめらかな床の上に質量$M$の長い板Aがあり,\ その上の左端に質量$m$の小物体Bを おいて初速度$v₀$を与えたところ,\ 小物体Bは板A上をある距離だけすべったところで 板Aに対して静止した.\ 板Aと小物体Bの間の動摩擦係数を$\mu$,\ 重力加速度の大きさ を$g$とする. 小物体Bが板Aに対して静止するまでの時間$t$を求めよ. 小物体Bが板A上をすべった距離$l$を求めよ. 小物体Bが板Aに対して静止したときの両物体の速さ$v$を求めよ. 板が床から受ける垂直抗力を$N_A$,\ 小物体が板から受ける垂直抗力を$N_B$\ とする. { }また,\ 板と小物体の右向きを正とする加速度・速度をそれぞれ$a_A$,\ $a_B$,\ $v_{ A},\ v_{ B}$とする. { }板Aについて $blue}{.8}{db} x軸方向の運動方程式は & color{db}{Ma_A=\mu N_B} y軸方向のつりあいは & color{db}{N_A=N_B+Mg} $ { }小物体Bについて $ x軸方向の運動方程式は & ma_B=-\mu N_B} y軸方向のつりあいは 板と小物体が進んだ距離をそれぞれ{運動量保存則}より $mv₀=(M+m)v}$ $ {v={m}{M+m}v₀}$ { }力積と運動量の関係}よりいきなり時間tを求めようとしてはいけない.\ 先に{成り立つべき物理法則をすべて立式する}. 運動方程式の解答手順1パターンにしたがって順番に思考していく. まずは2物体{A,\ B}が受ける力(重力と接触力)を全て図示する. 上に乗っている小物体{B}から考えるとよい. 小物体{B}は板{A}と接触しており,\ {板{A}から垂直抗力と摩擦力を受ける}. 小物体は静止中の板に対して{相対的に右に動く}から,\ 板から受ける摩擦力は{左向き}である. 静止摩擦力とは異なり,\ 動摩擦力はいかなる場合でも\mu Nで表せる. 次に板{A}が受ける接触力を考える.\ 板{A}は床と小物体{B}と接触している. 床からは垂直抗力,\ {小物体{A}からは板が小物体に与えた垂直抗力と摩擦力の反作用}を受ける. 当然,\ その摩擦力は\mu N_Bであり,\ \mu N_Aではないので注意してほしい. 結局,\ 板{A}は4つの外力,\ 小物体{B}は3つの外力によって運動を支配される. 本問の最初の関門がこの第1段階にあり,\ ここでいきなりつまずく人が少なくない. まず注意すべき点は,\ {小物体{B}は水平方向には左向きの摩擦力しか受けない}ことである. 右向きの初速度v₀より,\ 「右向きの力は何か」「摩擦力は右向き?」などと考えると間違える. 物体がどんな力を受けているかやその力の向きは物体の速度とは一切関係がない. 純粋に何と接触しているかだけを見て受ける力を考えなければならない. また,\ 摩擦力の向きにも注意が必要である.\ 上で述べたように判断するのが自然である. しかし,\ 「板{A}は右に動くから左向きの摩擦力を受ける?」という考えで間違える人が多い. もし運動の向きで摩擦力の向きを判断したいならば,\ {相対的な運動}を考えなければならない. 板{A}は小物体{B}(に乗った人)から見ると{相対的に左向きに運動}する. よって,\ 板{A}は{その相対的な左向きの運動を妨げる右向きに小物体{B}から摩擦力を受ける}. さらに言えば,\ 常識的に考えて{板{A}が右向きに動くのは明らか}である. では,\ なぜ板{A}が右に動くのだろうか.\ それは{外から右向きの合力を受けるから}に他ならない. このことを考慮しても板{A}が受ける摩擦力の向きは右向き以外にありえない. 静止中の板{A}が左向きの力を受けたとすると,\ 左向きに運動を始めることになり矛盾する. 力をすべて書き入れた後は座標軸を設定する. 両物体ともに右向きに運動するから,\ {右向きをx軸の正方向とし,\ 加速度も右向きを正とする}. 小物体{B}の水平方向の合力は左向きだが,\ {運動の向きを優先}して右向きを正とする. 力を分解する必要はないので,\ 後は立式するだけである. 練習のために4つの式をすべて立てたが,\ 結果的には板{A}のy軸方向のつりあいは必要ない. 連立すると,\ 自分で設定した未知のa_A,\ a_B,\ N_A,\ N_Bが全て求まる.\ ただし,\ N_Aは必要ない. さて,\ 本問における最大の注意点が次である. {物体の加速度・速度は地上で静止している人の立場で考える. つまり,\ {初速度v₀や加速度a_A,\ a_Bはすべて地上で静止中の人から見たもの}である. 今までの問題では意識せずに自然とやっていたのだが,\ 本問は特別に意識しなければ間違える. {B}が{A}に対して静止するとは,\ A}と{B}の静止中の人から見た速度が一致する}ことを意味する. 静止中の人から見た加速度a_{ A},\ a_{ B}から,\ 等加速度運動の公式\ v=v₀+at\ を用いて求められる. 静止中の人から見た速度v_{ A},\ v_{ B}が一致する条件を立式すると,\ 時間tが自然に求まる. {板{A}と小物体{B}の相互作用は,\ 最初に力を図示した時点ですでに考慮を完了している.} よって,\ {その後の運動の考察や立式において相手の影響を考える必要は一切ない.} 板{A}と小物体{B}が互いに独立した加速度運動していると考えて求めれば済むのである. 板{A}と小物体{B}の移動距離は,\ 等加速度運動の公式\ x=v₀t+12at²\ を用いて求められる. ただし,\ 求まるのは{静止中の人から見た移動距離}である. よって,\ 求める距離l(板{A}から見た相対的な小物体{B}の移動距離)は,\ x_{ B}-x_{ A}で求められる. 最後,\ の結果を用いてtを消去する. 時間t後のv_{ A}またはv_{ B}を求めればよい. とについては{力積と運動量}を利用した別解も考えられる.\ ここでは軽い説明にとどめる. なめらかな床からは外力を受けないから,\ 2物体の水平方向の運動量の合計は保存する. 最終的に一体になると考えて,\ {運動量保存則}が適用できる. M0+mv₀=(M+m)v また,\ 板{A}はtの間に力\mu N_{ B}を受け続けて速さが0からvになった. {(力積F t)=(運動量の変化)}\ より,\ \mu N_{ B} t=Mv-M0\ が成立する.
