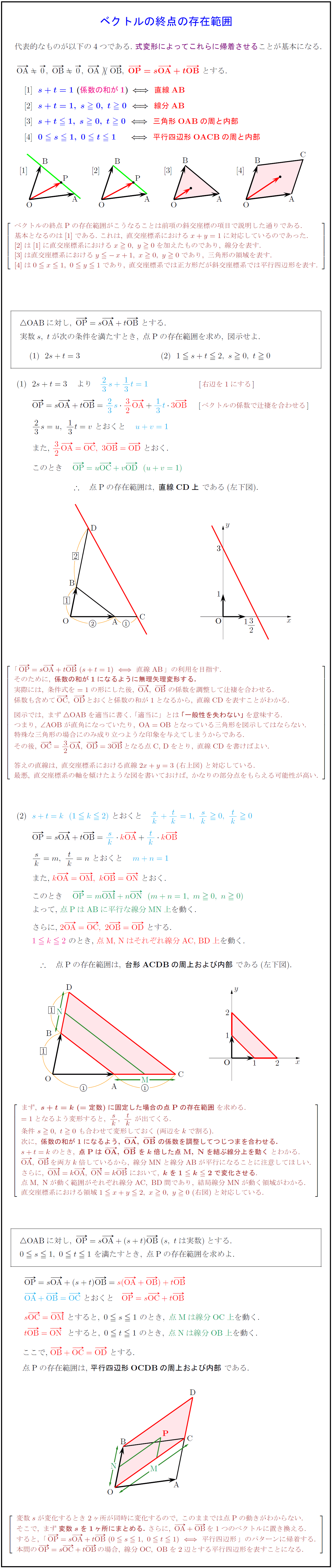
代表的なものが以下の4つである.\ 式変形によってこれらに帰着させることが基本になる.
$OA} 0},\ OB} 0},\ OA} OB},\ $OP}=sOA}+tOB$$\ とする.
ベクトルの終点 Pの存在範囲がこうなることは前項の斜交座標の項目で説明した通りである.
基本となるのはである.\ これは,\ 直交座標系におけるx+y=1に対応しているのであった.
はに直交座標系におけるx0,\ y0を加えたものであり,\ 線分を表す.
[3]は直交座標系におけるy-x+1,\ x0,\ y0であり,\ 三角形の領域を表す.
[4]は0 x1,\ 0 y1であり,\ 直交座標系では正方形だが斜交座標系では平行四辺形を表す.
「OP}=sOA}+tOB}\ (s+t=1)直線{AB}」の利用を目指す.
そのために,\ {係数の和が1になるように無理矢理変形する.}
実際には,\ 条件式を=1の形にした後,\ OA},\ OB}\ の係数を調整して辻褄を合わせる.
係数も含めてOC},\ OD}とおくと係数の和が1となるから,\ 直線CD}を表すことがわかる.
図示では,\ まず{ OAB}を適当に書く.\ 「適当に」とは{「一般性を失わない」}を意味する.
つまり,\ {∠ AOB}が直角になっていたり,\ {OA=OB}となっている三角形を図示してはならない.
特殊な三角形の場合にのみ成り立つような印象を与えてしまうからである.
その後,\ OC}=32OA},\ OD}=3OB}となる点C,\ D}をとり,\ 直線CD}を書けばよい.
答えの直線は,\ 直交座標系における直線2x+y=3\ (右上図)と対応している.
最悪,\ 直交座標系の軸を傾けたような図を書いておけば,\ かなりの部分点をもらえる可能性が高い.
まず,\ {s+t=k\ (=定数)に固定した場合の点{P}の存在範囲}を求める.
=1となるよう変形すると,\ sk,\ tk\ が出てくる.
条件\ s0,\ t0\ も合わせて変形しておく(両辺をkで割る).
次に,\ {係数の和が1になるよう,\ OA},\ OB}\ の係数を調整してつじつまを合わせる.}
s+t=kのとき,\ {点{P}は\ OA},\ OB}\ をk倍した点{M,\ N}を結ぶ線分上を動く}とわかる.
OA},\ OB}を両方k倍しているから,\ 線分{MN}と線分{AB}が平行になることに注意してほしい.
さらに,\ OM}=kOA},\ ON}=kOB}\ において,\ {kを1 k2で変化させる}.
点{M,\ N}が動く範囲がそれぞれ線分{AC,\ BD間}であり,\ 結局線分{MN}が動く領域がわかる.
直交座標系における領域1 x+y2,\ x0,\ y0\ (右図)と対応している.
点{P}の存在範囲は,\ ${平行四辺形{OCDB}の周上および内部}$\ である.
変数sが変化するとき2ヶ所が同時に変化するので,\ このままでは点{P}の動きがわからない.
そこで,\ まず{変数sを1ヶ所にまとめる.}\ さらに,\ OA}+OB}を1つのベクトルに置き換える.
すると,\ 「OP}=sOA}+tOB}\ (0 s1,\ 0 t1)平行四辺形」のパターンに帰着する.
本問のOP}=sOC}+tOB}の場合,\ 線分{OC,\ OB}を2辺とする平行四辺形を表すことになる.
$OA} 0},\ OB} 0},\ OA} OB},\ $OP}=sOA}+tOB$$\ とする.
ベクトルの終点 Pの存在範囲がこうなることは前項の斜交座標の項目で説明した通りである.
基本となるのはである.\ これは,\ 直交座標系におけるx+y=1に対応しているのであった.
はに直交座標系におけるx0,\ y0を加えたものであり,\ 線分を表す.
[3]は直交座標系におけるy-x+1,\ x0,\ y0であり,\ 三角形の領域を表す.
[4]は0 x1,\ 0 y1であり,\ 直交座標系では正方形だが斜交座標系では平行四辺形を表す.
「OP}=sOA}+tOB}\ (s+t=1)直線{AB}」の利用を目指す.
そのために,\ {係数の和が1になるように無理矢理変形する.}
実際には,\ 条件式を=1の形にした後,\ OA},\ OB}\ の係数を調整して辻褄を合わせる.
係数も含めてOC},\ OD}とおくと係数の和が1となるから,\ 直線CD}を表すことがわかる.
図示では,\ まず{ OAB}を適当に書く.\ 「適当に」とは{「一般性を失わない」}を意味する.
つまり,\ {∠ AOB}が直角になっていたり,\ {OA=OB}となっている三角形を図示してはならない.
特殊な三角形の場合にのみ成り立つような印象を与えてしまうからである.
その後,\ OC}=32OA},\ OD}=3OB}となる点C,\ D}をとり,\ 直線CD}を書けばよい.
答えの直線は,\ 直交座標系における直線2x+y=3\ (右上図)と対応している.
最悪,\ 直交座標系の軸を傾けたような図を書いておけば,\ かなりの部分点をもらえる可能性が高い.
まず,\ {s+t=k\ (=定数)に固定した場合の点{P}の存在範囲}を求める.
=1となるよう変形すると,\ sk,\ tk\ が出てくる.
条件\ s0,\ t0\ も合わせて変形しておく(両辺をkで割る).
次に,\ {係数の和が1になるよう,\ OA},\ OB}\ の係数を調整してつじつまを合わせる.}
s+t=kのとき,\ {点{P}は\ OA},\ OB}\ をk倍した点{M,\ N}を結ぶ線分上を動く}とわかる.
OA},\ OB}を両方k倍しているから,\ 線分{MN}と線分{AB}が平行になることに注意してほしい.
さらに,\ OM}=kOA},\ ON}=kOB}\ において,\ {kを1 k2で変化させる}.
点{M,\ N}が動く範囲がそれぞれ線分{AC,\ BD間}であり,\ 結局線分{MN}が動く領域がわかる.
直交座標系における領域1 x+y2,\ x0,\ y0\ (右図)と対応している.
点{P}の存在範囲は,\ ${平行四辺形{OCDB}の周上および内部}$\ である.
変数sが変化するとき2ヶ所が同時に変化するので,\ このままでは点{P}の動きがわからない.
そこで,\ まず{変数sを1ヶ所にまとめる.}\ さらに,\ OA}+OB}を1つのベクトルに置き換える.
すると,\ 「OP}=sOA}+tOB}\ (0 s1,\ 0 t1)平行四辺形」のパターンに帰着する.
本問のOP}=sOC}+tOB}の場合,\ 線分{OC,\ OB}を2辺とする平行四辺形を表すことになる.