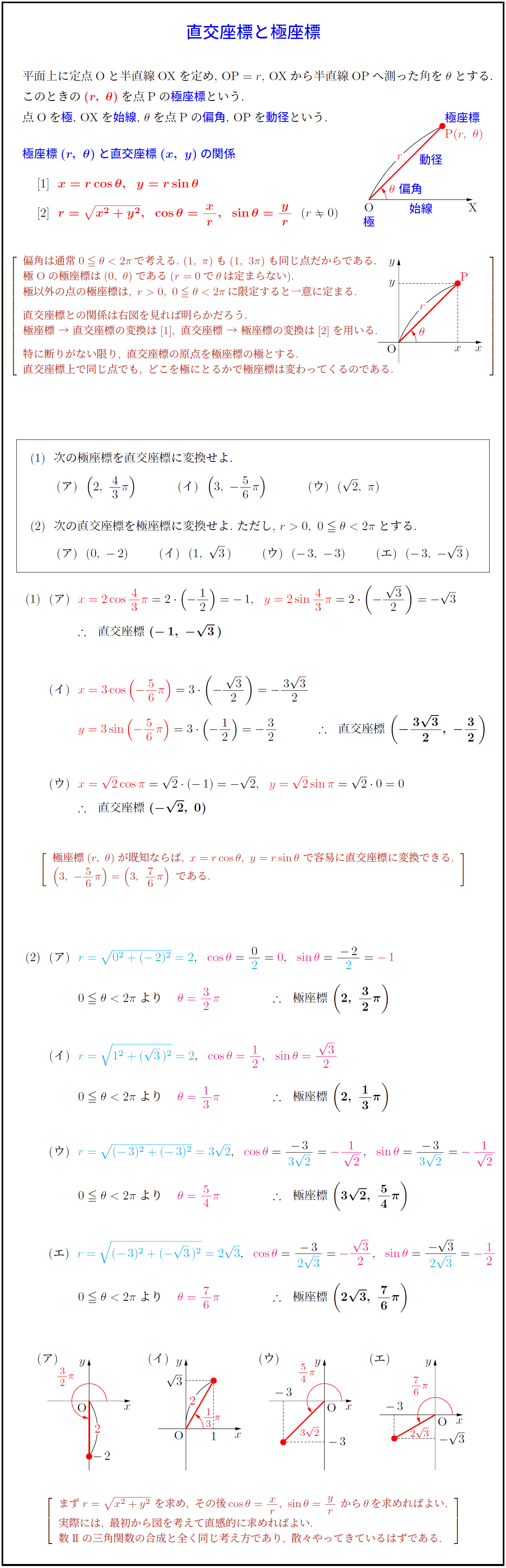
平面上に定点Oと半直線OXを定め,\ ${OP}=r$,\ OXから半直線OPへ測った角を$θ$とする. このときの${(r,\ θ)$を点Pの極座標という. 点Oを極,\ OXを始線,\ $θ$を点Pの偏角,\ OPを動径という. 極座標${(r,\ θ)}$と直交座標${(x,\ y)}$の関係 偏角は通常0θ<2πで考える.\ (1,\ π)も(1,\ 3π)も同じ点だからである. 極O}の極座標は(0,\ θ)である(r=0でθは定まらない). 極以外の点の極座標は,\ r>0,\ 0θ<2πに限定すると一意に定まる. 直交座標との関係は右図を見れば明らかだろう. 極座標\ →\ 直交座標の変換は,\ 直交座標\ →\ 極座標の変換はを用いる. 特に断りがない限り,\ 直交座標の原点を極座標の極とする. 直交座標上で同じ点でも,\ どこを極にとるかで極座標は変わってくるのである. まずr={x²+y²}\ を求め,\ その後cosθ= xr,\ sinθ= yr\ からθを求めればよい. 実際には,\ 最初から図を考えて直感的に求めればよい. 数II}の三角関数の合成と全く同じ考え方であり,\ 散々やってきているはずである.